The School of Mechanical and Materials Engineering Seminar Series, “Advanced in Biomimetic Stimuli-responsive Soft Gripper” Presented by Dr. ChangKyu Yoon

About the event
Advanced in Biomimetic Stimuli-responsive Soft Gripper
Presented by Dr. ChangKyu Yoon, Department of Mechanical Engineering, Sookmyung Women’s University, Seoul, South Korea
Abstract:
The manufactured modern medicine requires the development of miniaturized devices that can access hard-to-reach areas in the human body to complete therapeutic drug delivery or surgical procedures in less invasive and more effective manners. In this talk, I will discuss the challenges associated with operation of untethered small scale mobile soft grippers for surgery and drug delivery with an important result in the development of miniaturized and mechanized tools that were used to biopsy tissue and delivery drugs.
Stimuli-responsive and chemomechanical actuation schemes provide attractive means to enable off-chip actuation at small scales to overcome the challenges associated with harnessing power and especially, in- vivo.1 Furthermore, stimuli-responsive mobile soft robots can achieve mechanized functions at small scales without the need for any wires, tethers, or external power sources.2 I will describe mainly utilized actuation scheme that are compatible with clinical medicine. Importantly, the source of energy and actuation based on different swelling of polymers was utilized to perform in-vitro tissue biopsy using sub-mm sized untethered soft devices,3 single cell isolating,4 and biodegradable5 soft grippers. In addition to external global stimuli such as temperature, light, or pH, I will demonstrate highly sensitive and selective shape changes in hydrogels triggered by specific DNA molecules through successive crosslink extension,6 by plasmonic effects activated via ultrasound,7 and by programmable shape transformations induced through selective LEDs.8 When the photopatterned multi-layer planar soft machines are presented with the complementary strands, the machines can change shape in complicated and programmable ways, including stepwise or sequential shape changes. Finally, I will discuss the design, fabrication, control, and applications of untethered mobile soft robots using remote magnetic fields in enclosed spaces.
In summary, our results provide proof-of-concept that mobile micro-sized stimuli responsive soft grippers could be utilized to provide mechanized functions and operate within narrow conduits in the body. Such miniaturized untethered stimuli responsive soft grippers could provide desired functions and properties to achieve specified intelligent characteristics of advanced engineering systems for healthcare science.
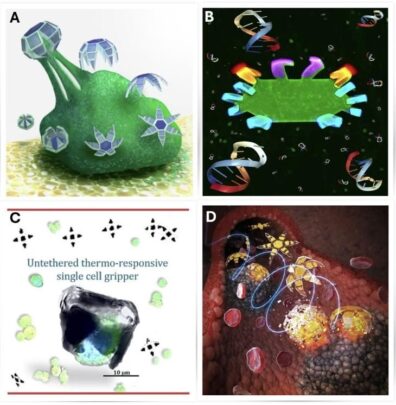
Fig 1. (A) Soft grippers for biopsy. (B) DNA-hybridized crab, (C) Single cell μ-gripper. (D) Biodegradable gripper for drug delivery.
References
[1] Fernandes, R; Gracias, D. H.; Mater. Today., 2009, 12, 14-20.
[2] Randhawa, J. S. et al. Adv. Funct. Mater., 2011, 21, 2395-2410.
[3] Breger, J. C.; Yoon, C. K. et al. ACS Appl. Mater. Interfaces, 2015, 7, 3398-3405.
[4] Jin, Q. et al. Nano Lett., 2020, 20, 5383-5390.
[5] Kim, J. et al. European Polymer Journal, 2025, 113742.
[6] Cangialosi A.*; Yoon, C. K.* et al. Science 2017, 357, 1126-1130.
[7] Son, H.* and Byun, E.* et al., ACS Macro Lett., 2020, 9, 1766-1772. [8] Oh, E.* and Lee, Y.* et al., Sci. Rep., 2025, 15, 9240.
Biography:
ChangKyu Yoon is an Associate Professor in the Department of Mechanical Engineering at Sookmyung Women’s University in Seoul, South Korea. He earned his Ph.D. in Materials Science and Engineering from Johns Hopkins University and completed postdoctoral research at the Max Planck Institute for Intelligent Systems. He also holds M.S. and B.S. degrees in Materials Science and Engineering from Washington State University. ChangKyu’s research focuses on developing innovative solutions to address current challenges in soft robotic engineering, particularly in materials, structures, and devices for applications in sensing, energy, and healthcare. His work explores the behaviors of coupled material systems through nano-, micro-, and macro-scale fabrication; 3D/4D printing; advanced structural, material, and mechanical characterizations; and in vitro/in vivo testing. His laboratory has been at the forefront of creating intelligent, multi-scale systems for healthcare applications. Over the course of his career, ChangKyu has co-authored approximately 40 papers and patents.